Capture All-EXperiences from the World
A general-purpose humanoid designed to seamlessly integrate into daily life and enhance human capabilities.
Human-Friendly Safety, Real-World Performance
A New Dimension of Physical Intelligence
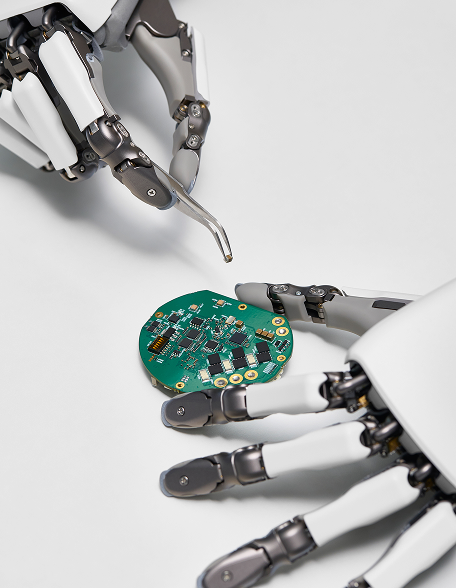
From delicate manipulation to dynamic operations. Engineered to minimize the sim-to-real gap for robust performance
Defining a New Paradigm of Humanoid Robots
ALLEX
Humanoid
Robots that Experience the World
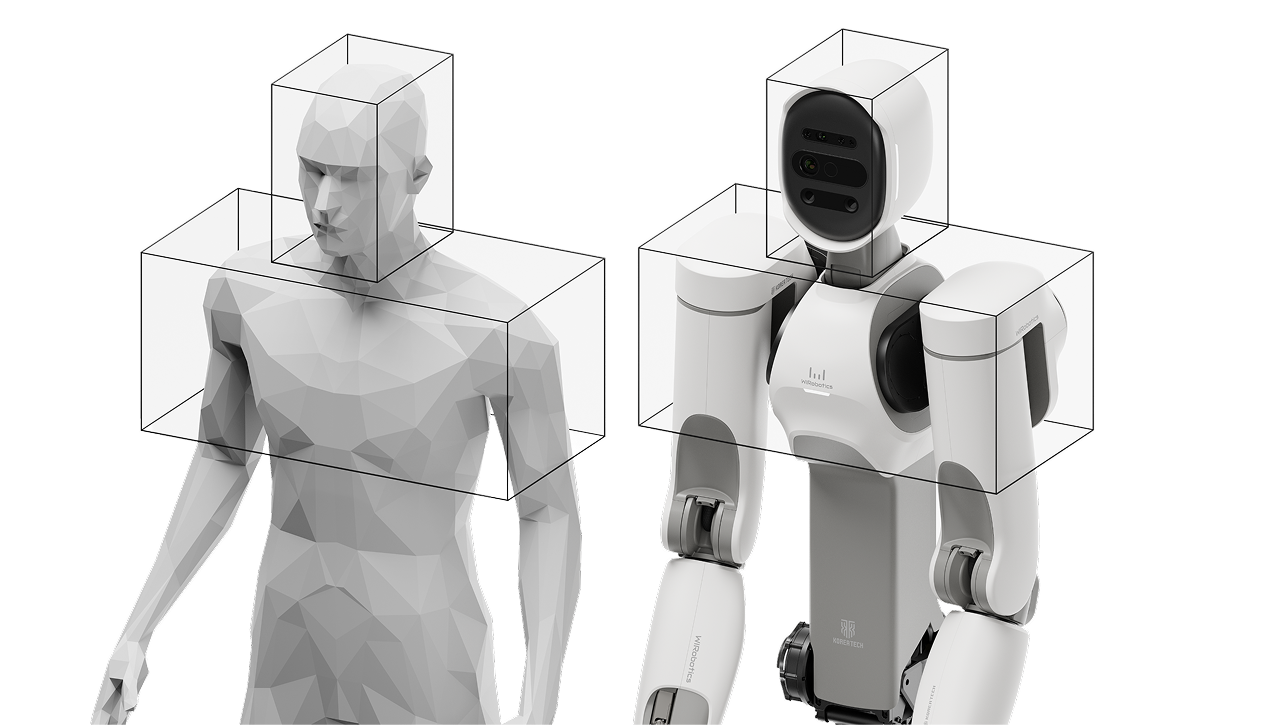
Robots that Experience the World
Designed to capture ALL-EXperiences from the world.
It combines whole-body compliance, human-like dexterity, and exceptional robustness to interact, adapt, and perform safely in real-world environments:
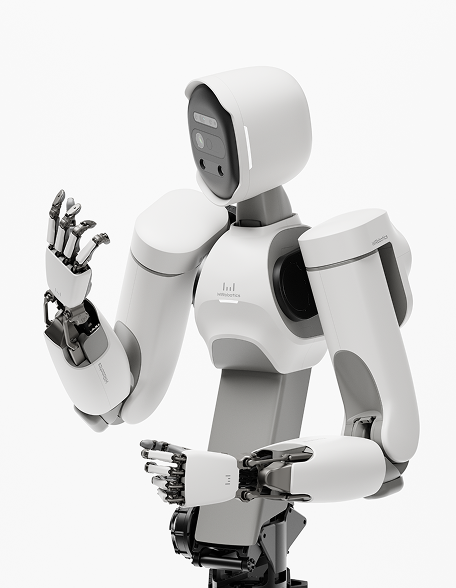
Whole-body Compliance
Whole-body Compliance across the arms, hands, neck, and waist

Extremely high backdrivability
Extremely high backdrivability and low distal mass — minimizing the sim-to-real gap
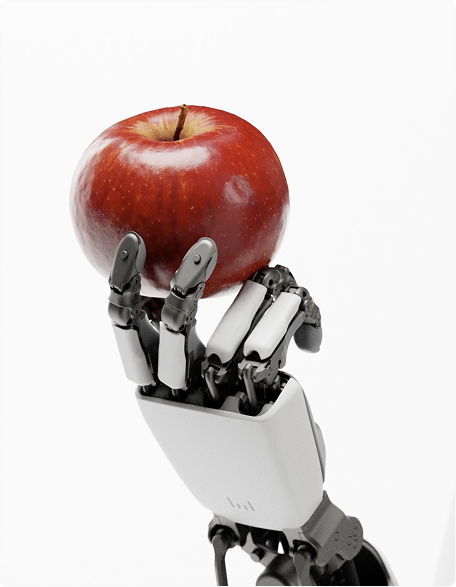
Human-level dexterity
Human-level dexterity through high-DOF hands that combine precision, compliance, and strength
Engineered for real-world performance
Engineered for real-world performance, from delicate manipulation to heavy-duty and high-impact tasks
Technical Brief
Whole-body Force Control and Interaction
High–DOF Compliant Robotic Hand
New Actuation and Control Technologies
Lightweight Structure with High Payload Capacity
High-speed Communication & Control
Specification
Product Name
ALLEX (Abbreviation for ALL-EXperience)
Form Factor
General-purpose humanoid robot upper body (Currently without lower body)
Hand/Arm DoF
15 Degrees of Freedom (DoF) including fingers and wrist
Sensing Capability
Detection and reaction to various physical stimuli such as force, contact, and impact (Force control)
Repeatability
Fingertip repeatability ≤ 0.5 mm
Handling Capacity
Capable of handling over 3 kg with one hand
Fingertip Force
Maximum 40 N
Hook Grip Strength
Over 30 kg
Weight
Hand section: approx. 700 g, Below shoulder: approx. 5 kg
Actuation Tech
Applied ultra-low friction, high-load actuators and gravity compensation waist mechanism
Key Feature
Capable of detecting minute forces at the 100 gf (gram-force) level even without force sensors